O soft starter é um dispositivo de controle de motor que integra partida suave, parada suave, economia de energia de carga leve e múltiplas funções de proteção. Ele consiste principalmente de tiristores antiparalelos trifásicos conectados em série entre a fonte de alimentação e o motor controlado e seu circuito de controle eletrônico. Diferentes métodos são usados para controlar o ângulo de condução de tiristores antiparalelos trifásicos, de modo que a tensão de entrada do motor controlado mude de acordo com diferentes requisitos.
1. Adota o controle automático digital do microprocessador, tem ótimo desempenho eletromagnético. partida suave, parada suave ou parada livre.
2. A tensão de partida, a corrente, o tempo de partida suave e de parada suave podem ser adotados de acordo com diferentes cargas para reduzir o choque da corrente de partida. Desempenho estável, operação fácil, exibição direta, volume pequeno, conjunto digital, possui funções de controle remoto e controle externo.
3. Tenha proteção contra perda de fase, sobretensão, sobrecarga, sobrecorrente, superaquecimento.
4. Possui funções de exibição de tensão de entrada, exibição de corrente operacional, autoinspeção de falhas, memória de falhas. Possui saída de valor de simulação de 0-20 mA, pode realizar monitoramento de corrente do motor.
O motor de indução CA tem vantagens de baixo custo, alta confiabilidade e manutenção pouco frequente.
Desvantagens:
1. A corrente de partida é 5 a 7 vezes maior que a corrente nominal. E isso requer que a fonte de alimentação tenha uma grande margem, o que também reduziria a vida útil do dispositivo de controle elétrico, melhorando o custo de manutenção.
2. O torque de partida é o dobro do torque de partida normal, causando choques na carga e danos aos componentes de acionamento. A soft-starter RDJR6 adota o módulo tiistor controlável e a tecnologia de mudança de fase para melhorar a tensão do motor regularmente. Além disso, pode atender aos requisitos de torque, corrente e carga do motor por meio de parâmetros de controle. A soft-starter da série RDJR6 adota um microprocessador para controlar e realizar as funções de partida e parada suaves de motores assíncronos CA, possui função de proteção completa e é amplamente utilizada em equipamentos de acionamento de motores nas indústrias metalúrgica, petrolífera, de mineração e química.
Especificação de produção
| Modelo nº. | Potência nominal (kW) | Corrente nominal (A) | Potência do motor aplicacional (kW) | Tamanho do formato (mm) | Peso (kg) | Observação | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | Figura 2.1 |
| RDJR6-7.5 | 7,5 | 15 | 7,5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18,5 | 37 | 18,5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | Figura 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | Figura 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
Diagrama
Parâmetro funcional
| Código | Nome da função | Faixa de configuração | Padrão | Instrução | |||||||
| P0 | tensão inicial | (30-70) | 30 | PB1=1, o modelo de declive de tensão é efetivo; quando a configuração PB é o modo atual, o valor padrão de tensão inicial é 40%. | |||||||
| P1 | tempo de partida suave | (2-60)s | 16s | PB1=1, o modelo de declive de tensão é eficaz | |||||||
| P2 | tempo de parada suave | (0-60)s | 0s | Configuração=0, para parada livre. | |||||||
| P3 | tempo do programa | (0-999)s | 0s | Após receber comandos, use o tipo de contagem regressiva para atrasar o início após o valor de configuração P3. | |||||||
| P4 | atraso de início | (0-999)s | 0s | Atraso de ação de relé programável | |||||||
| P5 | atraso do programa | (0-999)s | 0s | Após a remoção do superaquecimento e o atraso na configuração do P5, ele estava pronto | |||||||
| P6 | atraso de intervalo | (50-500)% | 400% | Relacionado à configuração de PB: quando a configuração de PB é 0, o padrão é 280% e a correção é válida. Quando a configuração de PB é 1, o valor limite é 400%. | |||||||
| P7 | corrente de partida limitada | (50-200)% | 100% | Use para ajustar o valor de proteção contra sobrecarga do motor, o tipo de entrada P6, P7 depende de P8. | |||||||
| P8 | Corrente operacional máxima | 0-3 | 1 | Use para definir o valor atual ou porcentagens | |||||||
| P9 | modo de exibição atual | (40-90)% | 80% | Abaixo do valor definido, a exibição de falha é “Err09″ | |||||||
| PA | proteção contra subtensão | (100-140)% | 120% | Acima do valor definido, a exibição de falha é “Err10″ | |||||||
| PB | método de partida | 0-5 | 1 | 0 limitado por corrente, 1 tensão, 2 chute + limitado por corrente, 3 chute + limite de corrente, 4 inclinação de corrente, 5 tipo de loop duplo | |||||||
| PC | proteção de saída permite | 0-4 | 4 | 0 primário, 1 carga mínima, 2 padrão, 3 carga pesada, 4 sênior | |||||||
| PD | modo de controle operacional | 0-7 | 1 | Use para selecionar as configurações do painel e do terminal de controle externo. 0, somente para operação do painel, 1 para operação do painel e do terminal de controle externo. | |||||||
| PE | escolha de reinicialização automática | 0-13 | 0 | 0: proibido, 1-9 para tempos de reinicialização automática | |||||||
| PF | parâmetro alterar permitir | 0-2 | 1 | 0: proibido, 1 para dados parcialmente alterados permitidos, 2 para dados totalmente alterados permitidos | |||||||
| PH | endereço de comunicação | 0-63 | 0 | Utilizado para comunicação de múltiplos soft-starters e dispositivos superiores | |||||||
| PJ | saída do programa | 0-19 | 7 | Use para configuração de saída de relé programável (3-4). | |||||||
| PL | corrente de parada suave limitada | (20-100)% | 80% | Use para configuração de corrente limitada de parada suave P2 | |||||||
| PP | corrente nominal do motor | (11-1200)A | valor avaliado | Use para inserir a corrente nominal do motor | |||||||
| PU | proteção contra subtensão do motor | (10-90)% | proibir | Use para definir funções de proteção contra subtensão do motor. | |||||||
Instrução de falha
| Código | Instrução | Problema e solução | |||||||||
| Erro00 | nenhuma falha | Falha de subtensão, sobretensão, superaquecimento ou parada transitória com terminal aberto foi corrigida. E o indicador do painel está aceso; pressione o botão "parar" para reiniciar e, em seguida, ligue o motor. | |||||||||
| Erro 01 | terminal de parada transitória externa está aberto | Verifique se o terminal transiente externo 7 e o terminal comum 10 estão em curto-circuito ou se o contato NF de outros dispositivos de proteção está normal. | |||||||||
| Erro 02 | superaquecimento do soft-starter | A temperatura do radiador excede 85°C, proteção contra superaquecimento, o soft-starter dá partida no motor com muita frequência ou a potência do motor não é aplicável ao soft-starter. | |||||||||
| Erro 03 | começando hora extra | Os dados de configuração inicial não são aplicáveis ou a carga é muito pesada, a capacidade de energia é muito pequena | |||||||||
| Erro 04 | perda de fase de entrada | Verifique se a entrada ou o loop principal apresentam falha, ou se o contator de bypass pode quebrar e fazer o circuito normalmente, ou se o controle de silício está aberto | |||||||||
| Erro 05 | perda de fase de saída | Verifique se a entrada ou o loop principal apresentam falha, ou se o contator de bypass pode quebrar e fazer o circuito normalmente, ou se o controle de silício está aberto, ou se a conexão do motor apresenta alguma falha. | |||||||||
| Erro 06 | trifásico desequilibrado | Verifique se a alimentação trifásica de entrada e o motor apresentam algum erro ou se o transformador de corrente emite sinais. | |||||||||
| Erro 07 | sobrecorrente de partida | Se a carga for muito pesada ou a potência do motor for aplicável com soft-starter, ou o valor de configuração PC (proteção de saída permitida), a configuração falha. | |||||||||
| Erro 08 | proteção de sobrecarga operacional | Se a carga for muito pesada ou P7, a configuração PP falha. | |||||||||
| Erro 09 | subtensão | Verifique se a tensão de entrada ou a data de configuração do P9 estão erradas | |||||||||
| Erro 10 | sobretensão | Verifique se a tensão de entrada ou a data de configuração do PA estão erradas | |||||||||
| Err11 | erro de configuração de dados | Altere a configuração ou pressione o botão “enter” para iniciar a redefinição | |||||||||
| Erro 12 | curto-circuito de carga | Verifique se o silício está em curto-circuito, ou se a carga está muito pesada, ou se a bobina do motor está em curto-circuito. | |||||||||
| Erro 13 | erro de reinicialização de conexão | Verifique se o terminal de partida externo 9 e o terminal de parada 8 estão conectados de acordo com o tipo de duas linhas. | |||||||||
| Erro 14 | erro de conexão do terminal de parada externo | Quando a configuração PD é 1, 2, 3, 4 (permite controle externo), o terminal de parada externo 8 e o terminal comum 10 não estão em curto-circuito. Somente quando estão em curto-circuito, o motor pode ser ligado. | |||||||||
| Erro 15 | subcarga do motor | Verifique o motor e o erro de carga. | |||||||||
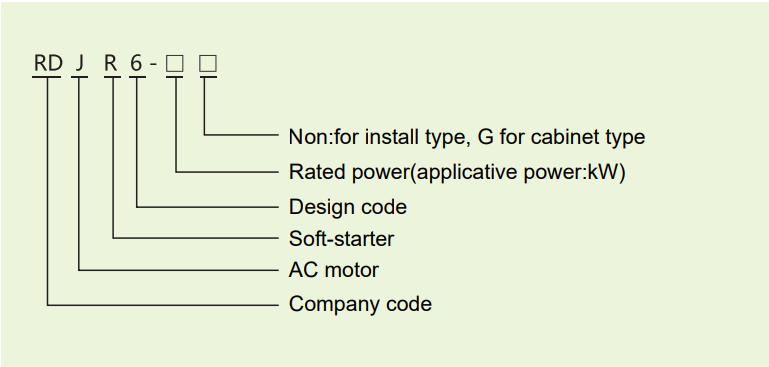
Modelo nº.
Terminal de controle externo

Definição de terminal de controle externo
| Valor do interruptor | Código do terminal | Função terminal | Instrução | |||||||
| Saída de relé | 1 | Saída de bypass | contator de bypass de controle, quando o soft starter inicia com sucesso, é contato NÃO sem fonte de alimentação, capacidade: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | Saída de relé programável | O tipo de saída e as funções são definidos por P4 e PJ, não há contato sem fonte de alimentação, capacidade: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | Saída de relé de falha | quando o soft starter apresenta falhas, este relé fecha, não há contato sem alimentação, capacidade: AC250V/5A | ||||||||
| 6 | ||||||||||
| Entrada | 7 | Parada transitória | partida suave normalmente, este terminal deve ser encurtado com o terminal 10. | |||||||
| 8 | Parar/reiniciar | conecta-se ao terminal 10 para controlar 2 linhas, 3 linhas, de acordo com o método de conexão. | ||||||||
| 9 | Começar | |||||||||
| 10 | Terminal comum | |||||||||
| Saída analógica | 11 | ponto comum de simulação (-) | A corrente de saída de 4 vezes a corrente nominal é de 20 mA, ela também pode ser detectada por um medidor CC externo. Ela pode gerar uma resistência de carga máxima de 300. | |||||||
| 12 | saída de corrente de simulação (+) | |||||||||
Painel de exibição

| Indicador | Instrução | ||||||||
| PREPARAR | quando ligado e pronto, este indicador acende | ||||||||
| PASSAR | quando em operação bypass, este indicador acende | ||||||||
| ERRO | quando a falha está acontecendo, este indicador fica aceso | ||||||||
| A | os dados de configuração são o valor atual, este indicador está aceso | ||||||||
| % | os dados de configuração são a porcentagem atual, este indicador está aceso | ||||||||
| s | os dados de configuração são de tempo, este indicador está aceso | ||||||||
instrução do indicador de estado
Instruções de botão
O soft-starter da série RDJR6 possui 5 tipos de estados operacionais: pronto, operação, falha, partida e parada, pronto, operação, falha
possui sinal indicador relativo. Instruções, veja a Tabela acima.
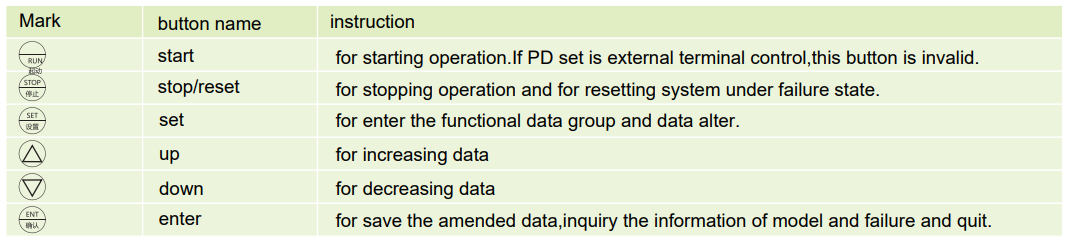
No processo de partida e parada suaves, não é possível definir dados, somente se estiver em outro estado.
No estado de configuração, o estado de configuração sairia do estado de configuração sem nenhuma operação após 2 minutos.
Primeiro pressione o botão “enter”, depois carregue e ligue o motor de arranque. Após ouvir o som de alerta, ele pode reiniciar o
dados de volta valor de fábrica.
Aparência e dimensão de montagem
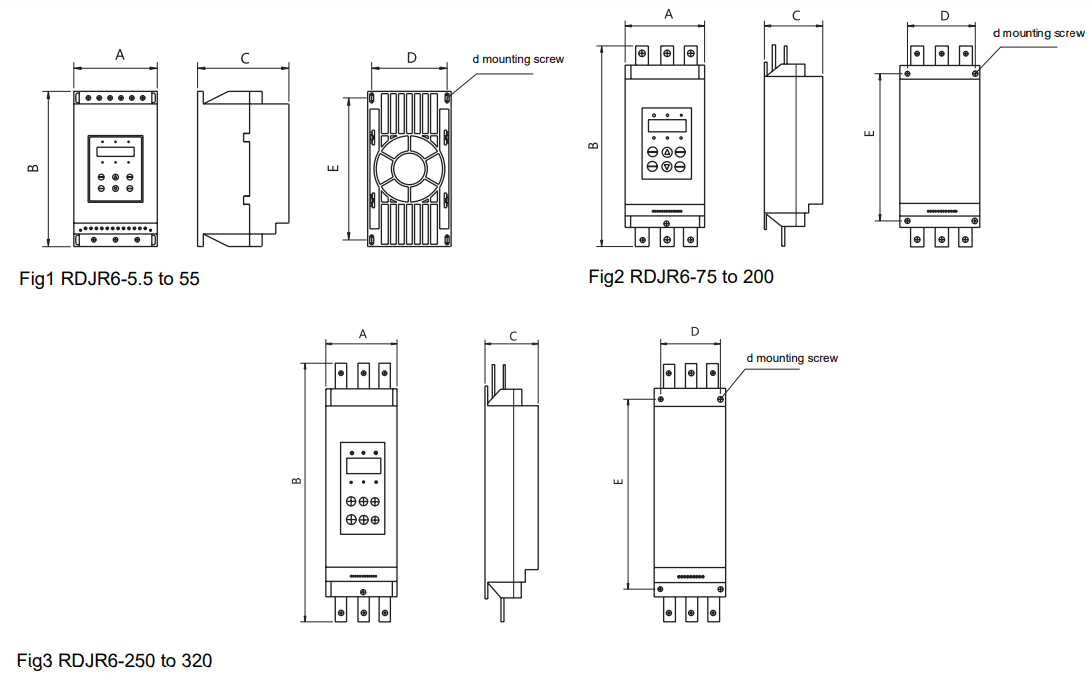
Diagrama de aplicação
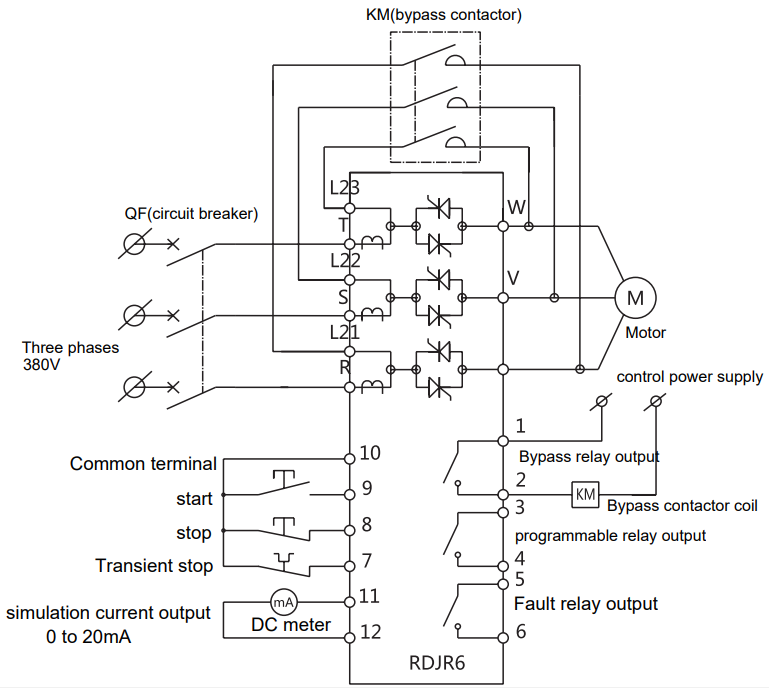
Diagrama de controle normal
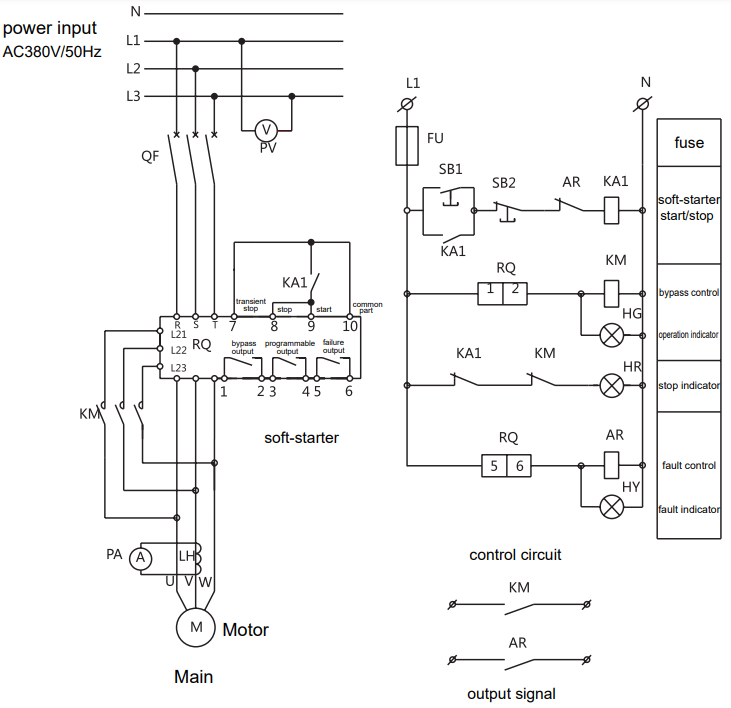
Instrução:
1. O terminal externo adota o tipo de controle de duas linhas. Quando o KA1 está fechado para partida, aberto para parada.
2. O soft-starter acima de 75 kW precisa controlar a bobina do contator de bypass pelo relé do meio, devido à capacidade limitada de acionamento do contato interno do relé do soft-starter.
12.2 um diagrama de controle comum e um de espera
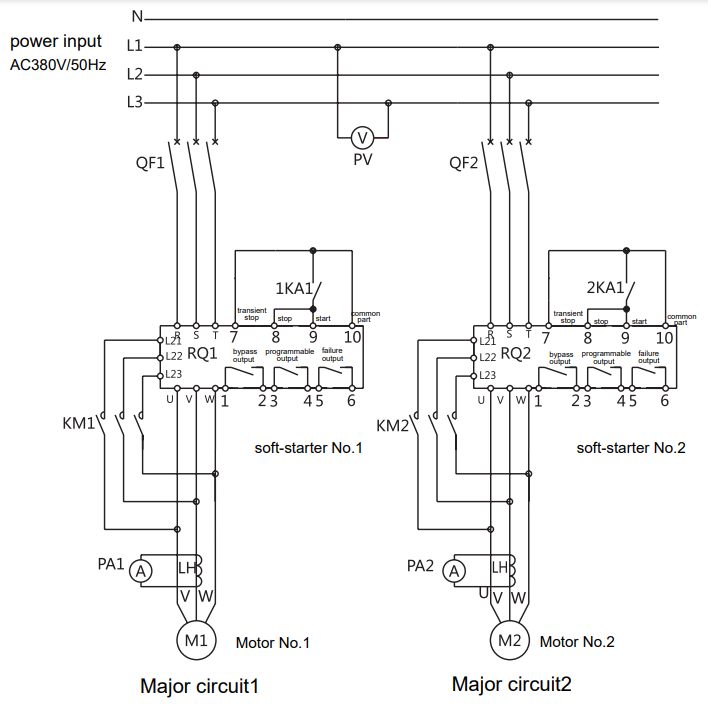
12.3 um diagrama de controle comum e um de espera
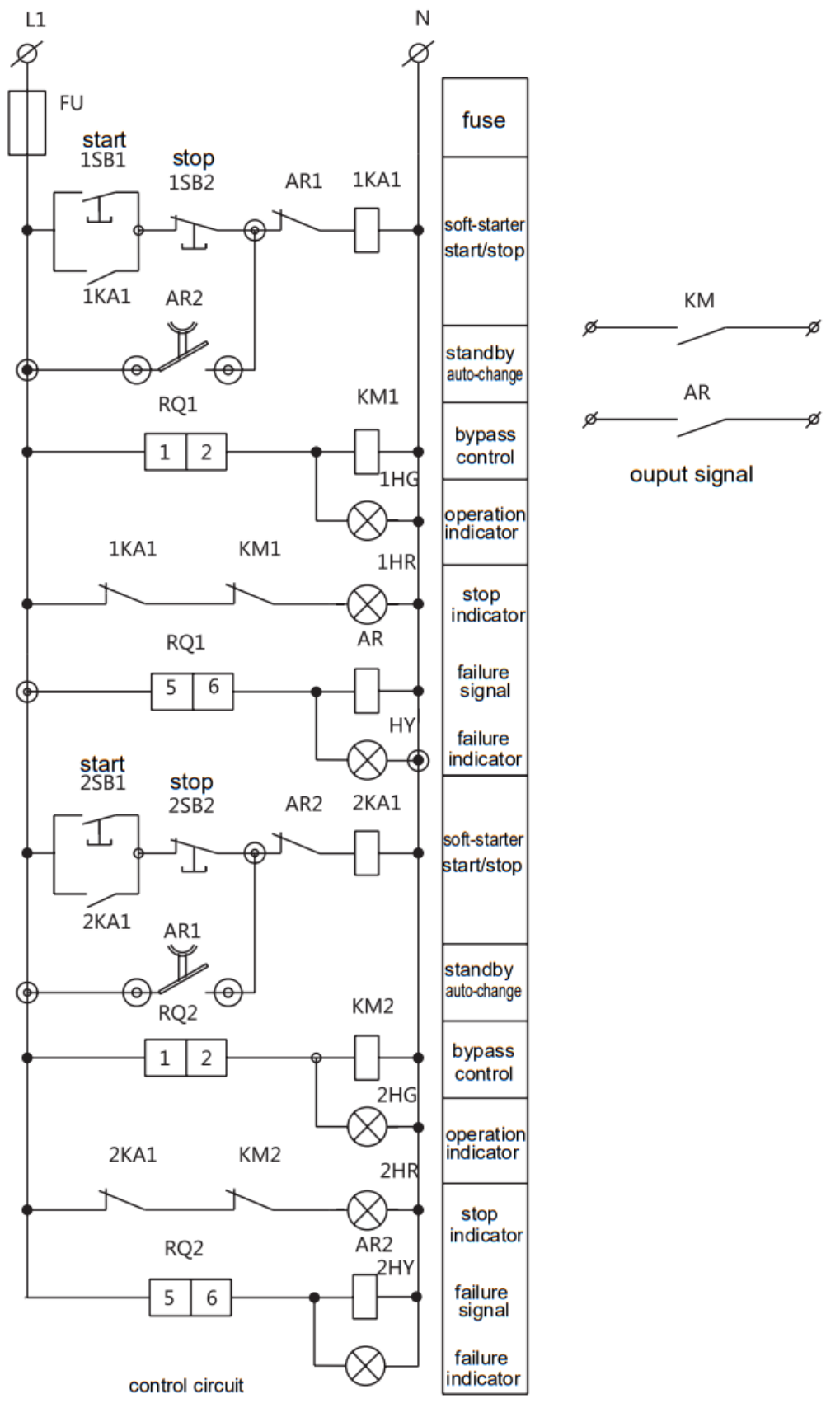
Instrução:
1. No diagrama, o terminal externo adota o tipo de duas linhas
(quando 1KA1 ou 2KA1 está fechado, ele inicia. quando eles estão quebrando, ele para.)
2. O soft-starter acima de 75 kW precisa controlar a bobina do contator de bypass pelo relé intermediário devido à capacidade limitada de acionamento do contato do relé intermediário interno do soft-starter.
O motor de indução CA tem vantagens de baixo custo, alta confiabilidade e manutenção pouco frequente.
Desvantagens:
1. A corrente de partida é 5 a 7 vezes maior que a corrente nominal. E isso requer que a fonte de alimentação tenha uma grande margem, o que também reduziria a vida útil do dispositivo de controle elétrico, melhorando o custo de manutenção.
2. O torque de partida é o dobro do torque de partida normal, causando choques na carga e danos aos componentes de acionamento. A soft-starter RDJR6 adota o módulo tiistor controlável e a tecnologia de mudança de fase para melhorar a tensão do motor regularmente. Além disso, pode atender aos requisitos de torque, corrente e carga do motor por meio de parâmetros de controle. A soft-starter da série RDJR6 adota um microprocessador para controlar e realizar as funções de partida e parada suaves de motores assíncronos CA, possui função de proteção completa e é amplamente utilizada em equipamentos de acionamento de motores nas indústrias metalúrgica, petrolífera, de mineração e química.
Especificação de produção
| Modelo nº. | Potência nominal (kW) | Corrente nominal (A) | Potência do motor aplicacional (kW) | Tamanho do formato (mm) | Peso (kg) | Observação | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | Figura 2.1 |
| RDJR6-7.5 | 7,5 | 15 | 7,5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18,5 | 37 | 18,5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | Figura 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | Figura 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
Diagrama
Parâmetro funcional
| Código | Nome da função | Faixa de configuração | Padrão | Instrução | |||||||
| P0 | tensão inicial | (30-70) | 30 | PB1=1, o modelo de declive de tensão é efetivo; quando a configuração PB é o modo atual, o valor padrão de tensão inicial é 40%. | |||||||
| P1 | tempo de partida suave | (2-60)s | 16s | PB1=1, o modelo de declive de tensão é eficaz | |||||||
| P2 | tempo de parada suave | (0-60)s | 0s | Configuração=0, para parada livre. | |||||||
| P3 | tempo do programa | (0-999)s | 0s | Após receber comandos, use o tipo de contagem regressiva para atrasar o início após o valor de configuração P3. | |||||||
| P4 | atraso de início | (0-999)s | 0s | Atraso de ação de relé programável | |||||||
| P5 | atraso do programa | (0-999)s | 0s | Após a remoção do superaquecimento e o atraso na configuração do P5, ele estava pronto | |||||||
| P6 | atraso de intervalo | (50-500)% | 400% | Relacionado à configuração de PB: quando a configuração de PB é 0, o padrão é 280% e a correção é válida. Quando a configuração de PB é 1, o valor limite é 400%. | |||||||
| P7 | corrente de partida limitada | (50-200)% | 100% | Use para ajustar o valor de proteção contra sobrecarga do motor, o tipo de entrada P6, P7 depende de P8. | |||||||
| P8 | Corrente operacional máxima | 0-3 | 1 | Use para definir o valor atual ou porcentagens | |||||||
| P9 | modo de exibição atual | (40-90)% | 80% | Abaixo do valor definido, a exibição de falha é “Err09″ | |||||||
| PA | proteção contra subtensão | (100-140)% | 120% | Acima do valor definido, a exibição de falha é “Err10″ | |||||||
| PB | método de partida | 0-5 | 1 | 0 limitado por corrente, 1 tensão, 2 chute + limitado por corrente, 3 chute + limite de corrente, 4 inclinação de corrente, 5 tipo de loop duplo | |||||||
| PC | proteção de saída permite | 0-4 | 4 | 0 primário, 1 carga mínima, 2 padrão, 3 carga pesada, 4 sênior | |||||||
| PD | modo de controle operacional | 0-7 | 1 | Use para selecionar as configurações do painel e do terminal de controle externo. 0, somente para operação do painel, 1 para operação do painel e do terminal de controle externo. | |||||||
| PE | escolha de reinicialização automática | 0-13 | 0 | 0: proibido, 1-9 para tempos de reinicialização automática | |||||||
| PF | parâmetro alterar permitir | 0-2 | 1 | 0: proibido, 1 para dados parcialmente alterados permitidos, 2 para dados totalmente alterados permitidos | |||||||
| PH | endereço de comunicação | 0-63 | 0 | Utilizado para comunicação de múltiplos soft-starters e dispositivos superiores | |||||||
| PJ | saída do programa | 0-19 | 7 | Use para configuração de saída de relé programável (3-4). | |||||||
| PL | corrente de parada suave limitada | (20-100)% | 80% | Use para configuração de corrente limitada de parada suave P2 | |||||||
| PP | corrente nominal do motor | (11-1200)A | valor avaliado | Use para inserir a corrente nominal do motor | |||||||
| PU | proteção contra subtensão do motor | (10-90)% | proibir | Use para definir funções de proteção contra subtensão do motor. | |||||||
Instrução de falha
| Código | Instrução | Problema e solução | |||||||||
| Erro00 | nenhuma falha | Falha de subtensão, sobretensão, superaquecimento ou parada transitória com terminal aberto foi corrigida. E o indicador do painel está aceso; pressione o botão "parar" para reiniciar e, em seguida, ligue o motor. | |||||||||
| Erro 01 | terminal de parada transitória externa está aberto | Verifique se o terminal transiente externo 7 e o terminal comum 10 estão em curto-circuito ou se o contato NF de outros dispositivos de proteção está normal. | |||||||||
| Erro 02 | superaquecimento do soft-starter | A temperatura do radiador excede 85°C, proteção contra superaquecimento, o soft-starter dá partida no motor com muita frequência ou a potência do motor não é aplicável ao soft-starter. | |||||||||
| Erro 03 | começando hora extra | Os dados de configuração inicial não são aplicáveis ou a carga é muito pesada, a capacidade de energia é muito pequena | |||||||||
| Erro 04 | perda de fase de entrada | Verifique se a entrada ou o loop principal apresentam falha, ou se o contator de bypass pode quebrar e fazer o circuito normalmente, ou se o controle de silício está aberto | |||||||||
| Erro 05 | perda de fase de saída | Verifique se a entrada ou o loop principal apresentam falha, ou se o contator de bypass pode quebrar e fazer o circuito normalmente, ou se o controle de silício está aberto, ou se a conexão do motor apresenta alguma falha. | |||||||||
| Erro 06 | trifásico desequilibrado | Verifique se a alimentação trifásica de entrada e o motor apresentam algum erro ou se o transformador de corrente emite sinais. | |||||||||
| Erro 07 | sobrecorrente de partida | Se a carga for muito pesada ou a potência do motor for aplicável com soft-starter, ou o valor de configuração PC (proteção de saída permitida), a configuração falha. | |||||||||
| Erro 08 | proteção de sobrecarga operacional | Se a carga for muito pesada ou P7, a configuração PP falha. | |||||||||
| Erro 09 | subtensão | Verifique se a tensão de entrada ou a data de configuração do P9 estão erradas | |||||||||
| Erro 10 | sobretensão | Verifique se a tensão de entrada ou a data de configuração do PA estão erradas | |||||||||
| Err11 | erro de configuração de dados | Altere a configuração ou pressione o botão “enter” para iniciar a redefinição | |||||||||
| Erro 12 | curto-circuito de carga | Verifique se o silício está em curto-circuito, ou se a carga está muito pesada, ou se a bobina do motor está em curto-circuito. | |||||||||
| Erro 13 | erro de reinicialização de conexão | Verifique se o terminal de partida externo 9 e o terminal de parada 8 estão conectados de acordo com o tipo de duas linhas. | |||||||||
| Erro 14 | erro de conexão do terminal de parada externo | Quando a configuração PD é 1, 2, 3, 4 (permite controle externo), o terminal de parada externo 8 e o terminal comum 10 não estão em curto-circuito. Somente quando estão em curto-circuito, o motor pode ser ligado. | |||||||||
| Erro 15 | subcarga do motor | Verifique o motor e o erro de carga. | |||||||||
Modelo nº.
Terminal de controle externo
Definição de terminal de controle externo
| Valor do interruptor | Código do terminal | Função terminal | Instrução | |||||||
| Saída de relé | 1 | Saída de bypass | contator de bypass de controle, quando o soft starter inicia com sucesso, é contato NÃO sem fonte de alimentação, capacidade: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | Saída de relé programável | O tipo de saída e as funções são definidos por P4 e PJ, não há contato sem fonte de alimentação, capacidade: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | Saída de relé de falha | quando o soft starter apresenta falhas, este relé fecha, não há contato sem alimentação, capacidade: AC250V/5A | ||||||||
| 6 | ||||||||||
| Entrada | 7 | Parada transitória | partida suave normalmente, este terminal deve ser encurtado com o terminal 10. | |||||||
| 8 | Parar/reiniciar | conecta-se ao terminal 10 para controlar 2 linhas, 3 linhas, de acordo com o método de conexão. | ||||||||
| 9 | Começar | |||||||||
| 10 | Terminal comum | |||||||||
| Saída analógica | 11 | ponto comum de simulação (-) | A corrente de saída de 4 vezes a corrente nominal é de 20 mA, ela também pode ser detectada por um medidor CC externo. Ela pode gerar uma resistência de carga máxima de 300. | |||||||
| 12 | saída de corrente de simulação (+) | |||||||||
Painel de exibição
| Indicador | Instrução | ||||||||
| PREPARAR | quando ligado e pronto, este indicador acende | ||||||||
| PASSAR | quando em operação bypass, este indicador acende | ||||||||
| ERRO | quando a falha está acontecendo, este indicador fica aceso | ||||||||
| A | os dados de configuração são o valor atual, este indicador está aceso | ||||||||
| % | os dados de configuração são a porcentagem atual, este indicador está aceso | ||||||||
| s | os dados de configuração são de tempo, este indicador está aceso | ||||||||
instrução do indicador de estado
Instruções de botão
O soft-starter da série RDJR6 possui 5 tipos de estados operacionais: pronto, operação, falha, partida e parada, pronto, operação, falha
possui sinal indicador relativo. Instruções, veja a Tabela acima.
No processo de partida e parada suaves, não é possível definir dados, somente se estiver em outro estado.
No estado de configuração, o estado de configuração sairia do estado de configuração sem nenhuma operação após 2 minutos.
Primeiro pressione o botão “enter”, depois carregue e ligue o motor de arranque. Após ouvir o som de alerta, ele pode reiniciar o
dados de volta valor de fábrica.
Aparência e dimensão de montagem
Diagrama de aplicação
Diagrama de controle normal
Instrução:
1. O terminal externo adota o tipo de controle de duas linhas. Quando o KA1 está fechado para partida, aberto para parada.
2. O soft-starter acima de 75 kW precisa controlar a bobina do contator de bypass pelo relé do meio, devido à capacidade limitada de acionamento do contato interno do relé do soft-starter.
12.2 um diagrama de controle comum e um de espera
12.3 um diagrama de controle comum e um de espera
Instrução:
1. No diagrama, o terminal externo adota o tipo de duas linhas
(quando 1KA1 ou 2KA1 está fechado, ele inicia. quando eles estão quebrando, ele para.)
2. O soft-starter acima de 75 kW precisa controlar a bobina do contator de bypass pelo relé intermediário devido à capacidade limitada de acionamento do contato do relé intermediário interno do soft-starter.